tomcat
注记
数据仓库
PMP
图像阴影消除
编程语言
iot
前后端分离考试系统
进程替换
rockchip
标准库与HAL库实现
资损
如何修复网站漏洞
上位机
初识SpringBoot
知识计算
IL汇编
scikit-learn
stash
云服务器ECS
现代机器人学
2024/4/11 20:30:24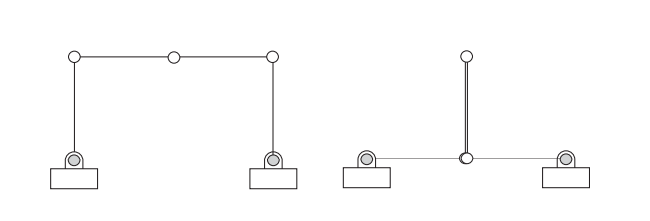
【现代机器人学】学习笔记六:闭链运动学
这一章的内容主要讲并联机器人的相关算法,内容在全书中属于比较少,仅仅介绍概念的章节。
恰好部门中有一位同事就是专门做并联机器人出身的博士,也请他帮忙看了一下内容,但他觉得写书的这个人可能也不是非常懂并联机器人…
【现代机器人学】学习笔记一:位形空间
由于工作的关系,一年前开始接触机械臂。与此同时也在学习【现代机器人学】与【机器人学导论】两本书,感觉【现代机器人学】写的更好一些。大致走马观花的看了一遍,确实有所收获。因此想再从头过一遍,做一些总结,写给自…
【现代机器人学】学习笔记十四:中文版印刷/翻译勘误
首先声明,这个印刷/勘误并非经过官方的认可,只是我个人的粗浅的理解。如果内容有误,恳请大家谅解指正。
其实有的并不算错,只是我个人认为不太准确,在我学习过程中产生了一些小疑惑和误解。
都是一些小毛病ÿ…